| |
|
Теперь перейдем к конструкции и наладке блока управления.
Блок управления был выполнен на печатной плате (файл печатной платы)
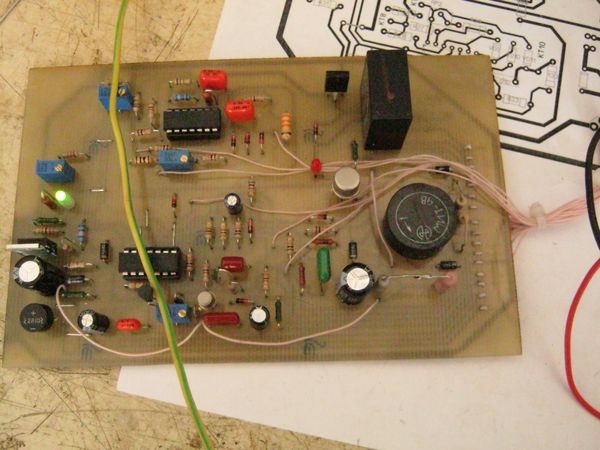
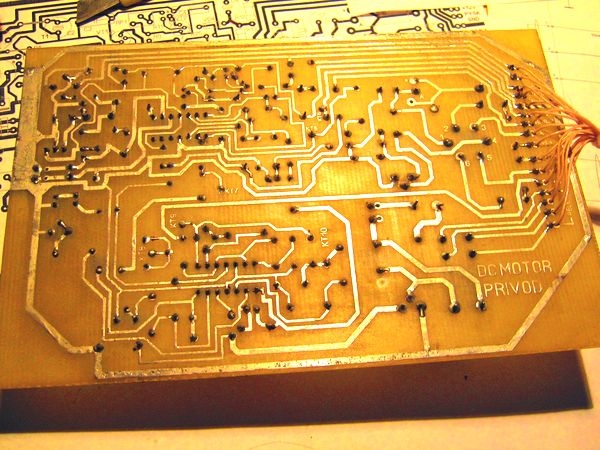
Плата проводом МГТФ соединена с разъемом, для удобства демонтажа при ремонте.
Настройка
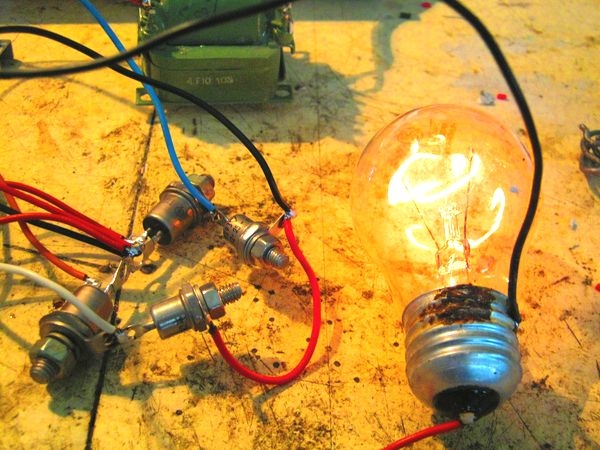
На время настройки была собрана силовая часть навесным монтажем, в качестве нагрузки была использована обычная лампа накаливания.
Наладку начинаем с проверки напряжений питания и напряжения питания на операционных усилителях DA1, DA2. Микросхемы желательно ставить в панельки. Потом контролируем осциллограммы в контрольных точках КТ1, КТ2, КТ3 (осциллограммы в этих точках приведены в начале описания СИФУ). Теперь, осциллограф ставим в контрольную точку КТ4. Должны быть пилообразные импульсы, как на осиллограмме выше (кнопка «Пуск» в этот момент должна быть разомкнута). Подстроечным резистором RP1 необходимо выставить размах «пилы» равным 9 вольт, это очень важный момент, так как от него зависит дальнейшая работа схемы. Так как разброс параметров полевых транзисторов бывает весьма значительный, возможно диапазона регулировки RP1 может не хватить, тогда подбором номинала резистора R10 добиться нужного размаха. В контрольной точке КТ3 длительность импульса должна быть 1.5 — 1.8ms, если нет, то подбором резистора R4 (в сторону уменьшения) добиться необходимой длительности.
Вращая регулятор RR1 в контрольной точке КТ5 проконтролировать изменение скважности импульсов от максимума до полного их исчезновения при нижнем положении движка RR1. При этом должна изменятся яркость лампочки подключенной к силовому блоку.
Далее подключаем блок управления к двигателю и тахогенератору. Выставляем регулятором RR1
напряжение на якоре около 40-50 вольт. Резистор RP3 должен быть установлен в среднее положение. Контролируя напряжение на якоре двигателя, начинаем вращать резистор RP3. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь. Для желающих поэкспериментировать: для увеличения жесткости привода можно также увеличить сопротивление R24, увеличив тем самым коэффициент усиления регулятора либо увеличить резистор R32.
Если используется обратная связь по току якоря двигателя.
Для этого, как говорилось выше, необходим трансформатор тока, включенный в цепь питания
управляемого выпрямителя. Схема калибровки трансформатора тока дана ниже. Подбором резистора получить на выходе трансформатора переменное напряжение ≈ 2 ÷ 2.5v. Мощность нагрузки RN1 должна соответствовать мощности двигателя.
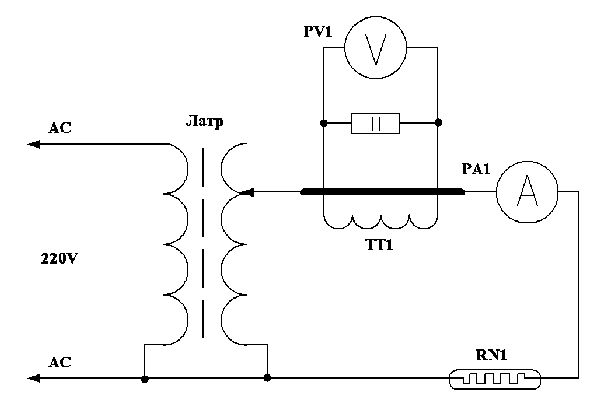
Внимание! Трансформатор тока без нагрузочного резистора не включать.
Подключаем трансформатор тока к цепи обратной связи P1 и P2. На время настройки «Регулятора» желательно выпаять диод D12, чтобы исключить ложное срабатывание защиты.
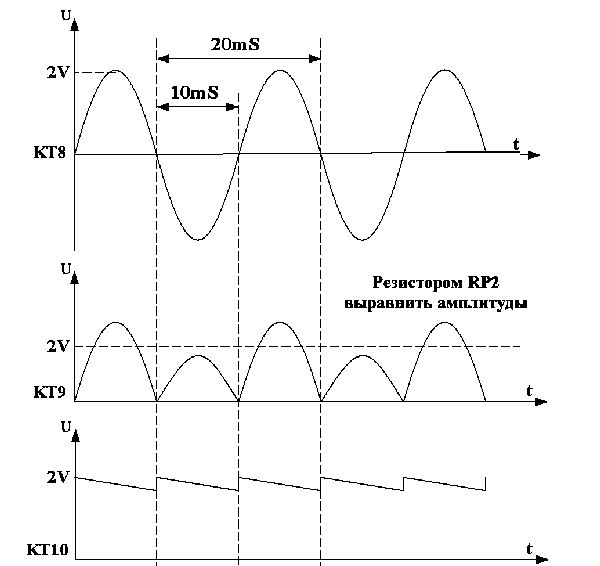
Осциллограммы в контрольных точках КТ8, КТ9, КТ10 должны быть как на рисунке ниже.
Дальнейшая настройка такая же как и в случае с использования тахогенератора.
Если используется обратная связь по напряжению якоря двигателя.
Как отмечалось выше, можно применить обратную связь по якорному напряжению, для этого собирается датчик якорного напряжения. Настройка блока управления производиться следующим образом. Резисторы “Задание” и “Масштабирование Uoc” выставляется в среднее положение. Резистор R5 датчика якорного напряжения выводиться в нижнее к “земле” положение. Включаем привод и выставляем напряжение на якоре двигателя примерно 110 вольт. Контролируя напряжение на якоре двигателя, начинаем вращать резистор R5. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь.
Данный блок управления изготавливался для расточного станка. Вот фото этого монстра

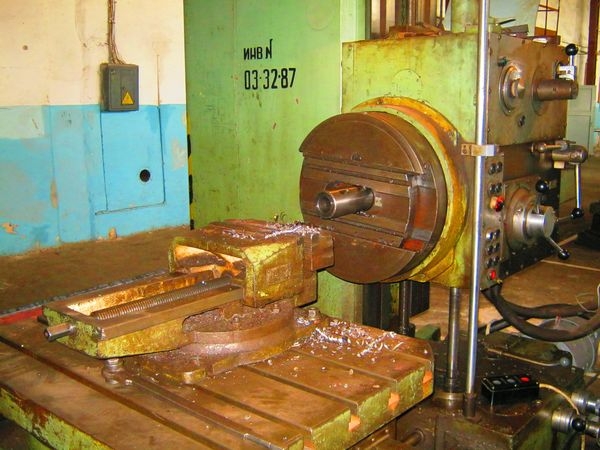
На этом станке вышел из строя электромашинный усилитель, который и управлял двигателем постоянного тока перемещения стола.
Вот такой электромашинный усилитель.

Заместо него и делался данный блок управления.
Вот фото самого двигателя постоянного тока.

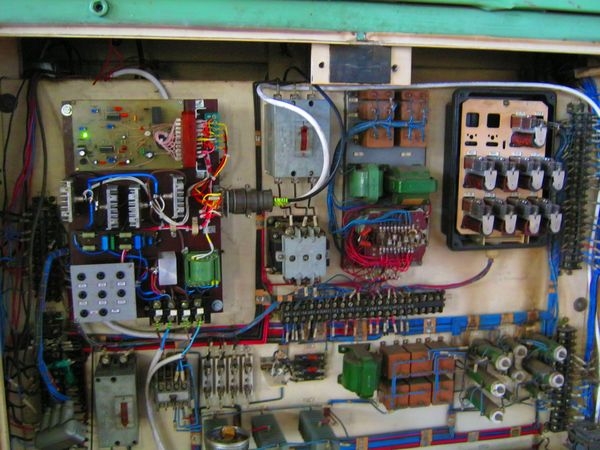
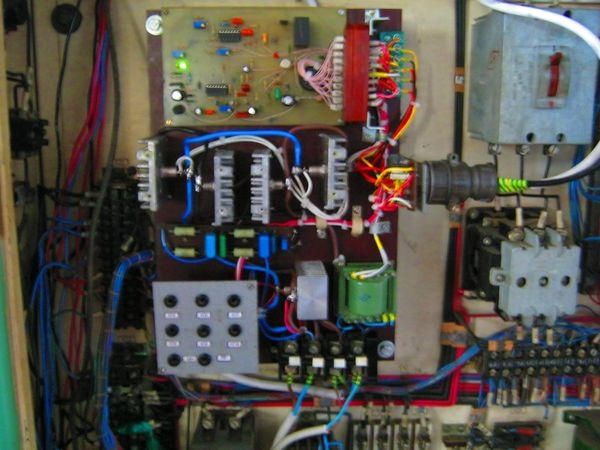
Блок управления был собран на изоляциоонном основани, где размещены все основные элементы.
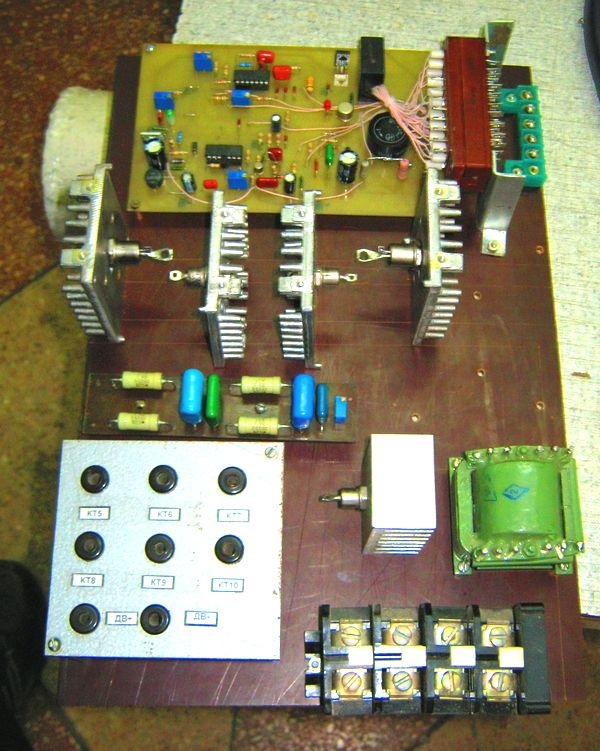
Силовые диоды и тиристоры установлены на теплоотводы. Так же была сделана панель с разъемами, куда были выведены сигналы с контрольных точек схемы. Это делалось для удобство настройки и ремонта непосредственно на станке.
Вот смонтированный блок управления в силовом шкафу станка

На другой стороне силового шкафа был установлен маленький пульт управления.

На нем расположены:
-тумблер включения блока
-тумблер режима работы. Так как для установочных перемещений стола станка, точный контроль и стабилизация оборотов не нужны, то на это время цепь обратной связи шунтируется.
-ручки регулировки количества оборотов. Было поставлено два переменных резистора, один для грубой регулировки, второй — многооборотный — для точной установки нужных оборотов при черновой и чистовой расточке детали.
Кому интересно, ниже представлено видео работы станка. Сперва, показывается расточка отверстия в стальной плите толщиной 20мм. Потом показывается с какой частотой вращается винт подачи стола станка. С этой скорость подается деталь на резец, а такую частоту вращения подающего винта обеспечивает двигатель постоянного тока, для которого, собственно, все это и делалось.
Блок управления показал себя хорошо, сбоев и аварий не было. |
|
| |
|
|
|
|
|